什么是游憩机会谱系(ROS,全称 Recreation Opportunity System)?
冯纪忠雄
游憩机会谱系(Recreation Opportunity System,简称 ROS)是由美国林务局开发, 在其下属的国有林地游憩管理中有着普遍的应用,也是推动各国国家公园发展的一种重要技术手段。它从影响游客体验的角度,综合自然、社会和管理特征,将游憩地划分为不同的等级,不同等级对资源的保护程度不同,对设施的要求不同,从而形成保护和开发程度不同的游憩环境,提供不同的游憩机会,满足游客的多样化需求。
ROS理论将“人们选择一个偏好的游憩环境,去参加某项活动,得到期望的游憩体验的可能视为一个游憩机会”。游憩环境由自然、社会、管理3个方面的指标去描述,将这些指标的各种变化情况组合起来,就可以为游客提供一系列的游憩机会。例如,美国林务局将游憩地根据:
可进入性(access)、偏僻程度(remoteness)、视觉特征 (visual characteristics )、场地管理(site management)、游客管理(visitor management)、社会相遇(social encounters)、游客冲击(visitor impacts)7个指标
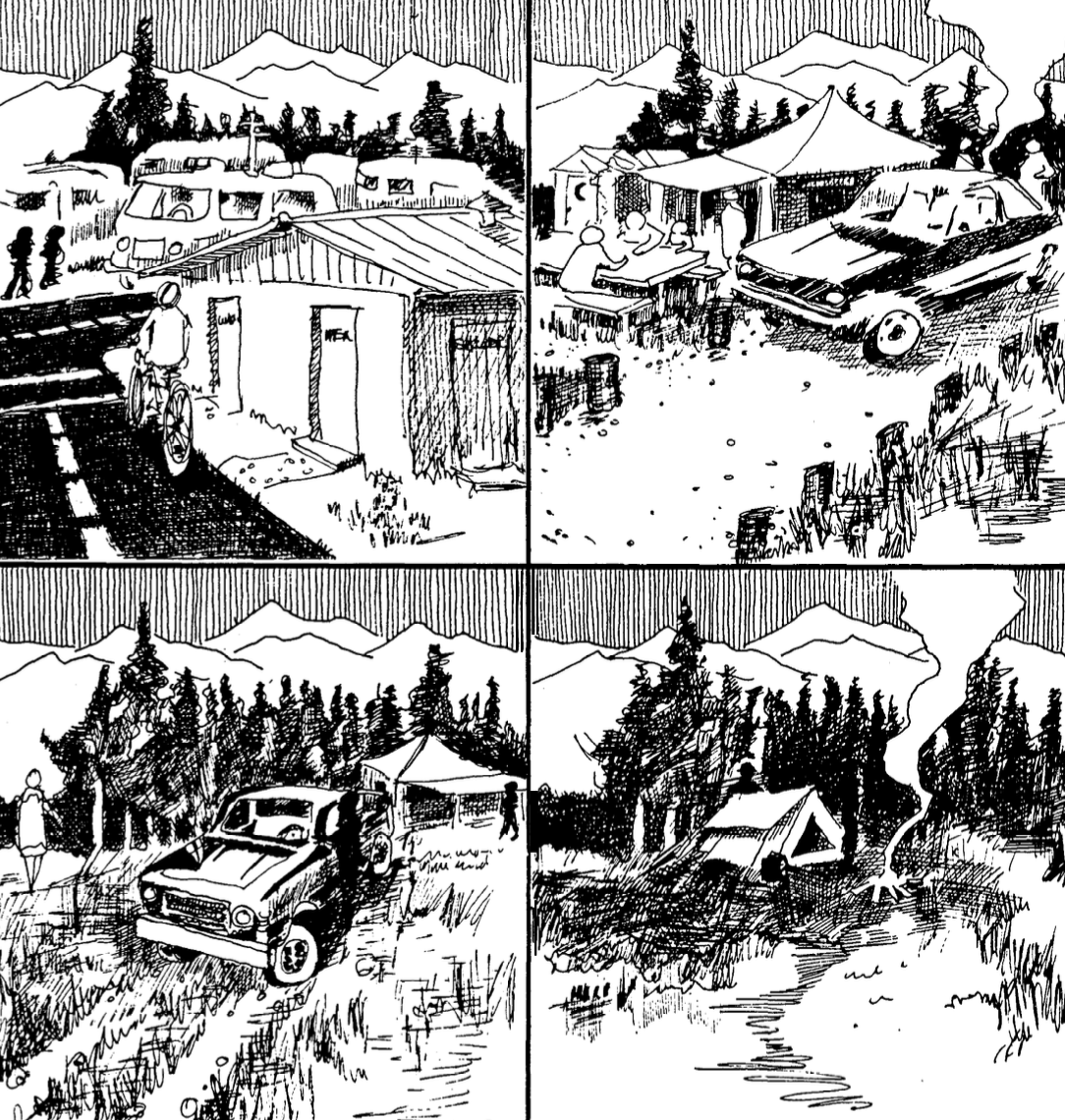
分为6类游憩环境,分别是:
原始区域、
半原始无机动车区域、
半原始有机动车区域、
有道路的自然区域、
乡村区域、
城市区域。
原始区域对各指标要求最为严格,城市区域兼容性最强。一级指标之下还有二级指标,如可进入性包括交通模式(the mode of transport) 和道路等级(service levels of roads)两个二级指标。
上述7个指标经过调查研究得出,能够区分一系列游憩环境和机会。这些指标在每一游憩环境里确定可接受变化的极限(limits of acceptable change,LAC), 公园的规划和管理对环境带来的变化要在可以接受的极限之内。在一定的周期内对7个指标进行考察,确定7个指标的实际状况,将实际状况与标准相比,考察是否在可以接受的极限内,是否需要采取措施。
更多关于游憩机会谱系(Recreation Opportunity System,简称 ROS)可参考ROS原文:
《The Recreation Opportunity Spectrum: A Framework for Planning, Management, and Research》提取码是4imb
